
独自開発した小型軽量で高出力なアクチュエータと小型高効率リンク機構を搭載した多指ハンドで、屋外(工事現場、屋外プラント、災害現場等)での重作業用途での活用が期待できる
Advantages
- 50 kgf以上の高い把持力を発生し、消費電力ゼロで50kgfの保持力を維持可能。
- 自由度の高い構造で、複雑で巧緻な動作が可能であり、人間が使う工具の使用も可能。
Background and Technology
労働人口の減少や賃金コストの高騰などの理由により、人間に替わるロボットのニーズは高まっている。多指ハンドは、物体の把持・操作など複雑で多種多様な作業の実現が期待され、人間の作業の代替を目的として、さまざまな分野で研究開発が進められているものの、小型軽量・高出力・高い巧緻性・高い耐候性を満たした多指ハンドは実現されていない。現状、産業用ロボットにおいて、人間の手に相当する部分は2指ないし3指による平行的な動作のみの簡素なグリッパが使用され、かつ、部品の形状に合わせて複数のグリッパを交換しながら使用されており、これらのグリッパでは、人間が使用する振動・衝撃の大きな電動工具をそのまま取り扱う事もできない。
また、ロボットを屋外環境において長時間運用するには、バッテリー容量や充電環境の制約などからそのバッテリー消費を抑える必要があるが、一般的な電磁モータを駆動源としたロボットハンド(ロボット本体も含む)では、その姿勢を維持するだけでも電力を必要とする。例えば、ロボットハンドが電動ドリルを把持し、壁に穴をあける作業を行う場合、この把持姿勢を維持するだけでも電力を消費することとなる。さらに、重い物体の把持には高出力が必要となり、より多くの電力が必要となる。
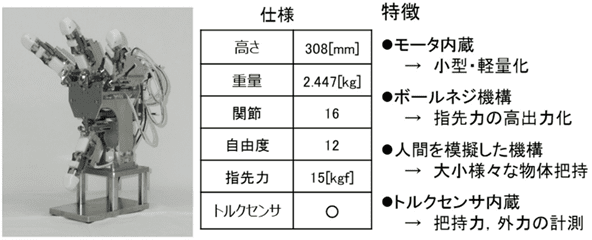
発明者らのグループでは、独自開発した研究開発用プラットフォームとなる5指ロボットハンドを有しており、ハード面だけでなく、ソフト面の開発も行いながら研究を進められている。
本研究では、低消費電力で高出力のロボットハンドを実現するため、小型高効率リンク機構や機構特性を考慮した制御法などを独自開発し、それらを搭載した多指ハンドを試作した。
Expectations
- 試作ロボットハンドにより、56.1 kg(土嚢+グリップボール)の重量物の無通電保持を実現した。
- 試作ロボットハンドを搭載した機構を用いて、質量 15.4 kg のハンマードリル(本体+ダイヤンドコアピット含む)によるコンクリート板穿孔の作業を実施した。3指によるハンマードリルのグリップ部の無通電保持と1指によるトリガー操作により、穿孔できることを確認した。
本ロボットハンドの活用や本研究者との連携等にご興味のある企業を探索しております。ご興味がございましたら、先ずは、研究者との面談をご提案いたしますので、技術の詳細説明とディスカッションから、スタートさせていただければ幸いです。また、研究室をご訪問いただいての、試作見学も可能です。
Publications
Patents
- 特許7015508号、特許6982289号 など
Researcher
毛利 哲也 教授 (岐阜大学 工学部)
以下のフォームからお問い合わせください