
広範囲の近接覚・触覚検知が可能になり、人とロボットが安全に協働できる
Advantages
- ToFセンサ及び静電容量センサからなる複合センサにより、検出範囲が拡大し死角を減らせる。
- 既存の産業用ロボットアーム/ハンドに対し、後付けで搭載可能。
- 対象表面全体にセンサを複数設置すると皮膚のようにセンシングでき、より安全性を高められる。
Background and Technology
人手不足や作業効率化の解決方法のひとつとして、工場や倉庫では人と一緒に働く協働ロボットの導入が進んでいる。ロボットと人が一緒に作業を行うためには安全性の確保が必須であり、そのためには人の接近や人と接触したことを感知するセンサ(近接覚・触覚センサ)が重要である。
本発明者は、協働ロボットの『皮膚』の役割を担い人の接近や接触を感知する新たなセンシング機構として、ToFセンサと静電容量センサとを組み合わせた近接覚・触覚センサを開発した。ToFセンサは距離検出が可能であり、センサに対し距離方向(Z軸方向)の検出範囲は広いものの、近距離における検出精度やセンサに対して水平方向(XY平面方向)の検出範囲は狭いという特徴がある。一方、静電容量センサは近距離の検出感度が高く、接触状態を測定できるが、距離検出が難しく、Z軸の検出距離が短いというデメリットがある。
そこで本発明者は、これら二つのセンサを組み合わせることで、それぞれの得意領域がお互いの苦手領域を補い合う、近接から接触まで広範囲にシームレスな測定が可能な、ロボット搭載用の新たなセンサを完成させた。本発明センサはロボットアーム等の実装面全面に複数個設置することもでき、また既に別のセンサ機能を搭載しているロボット等にも後付けで取り付けることも可能なことから、安全性の改善や向上にも応用できる。
Data
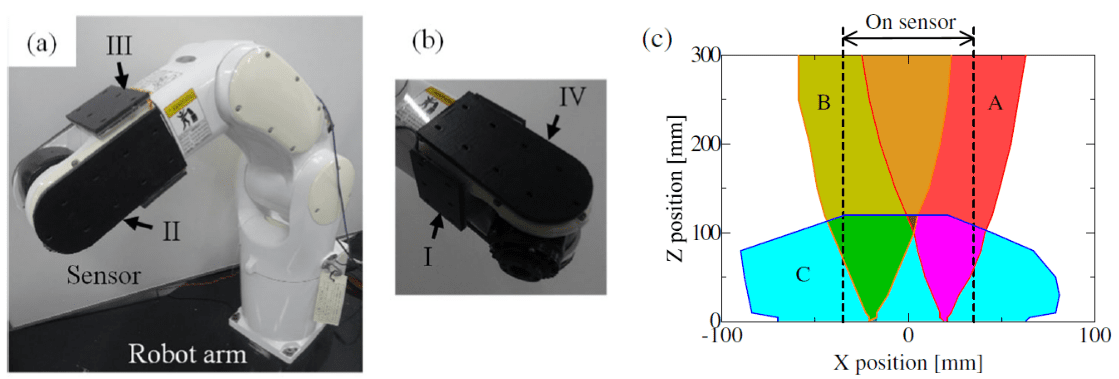
- 下図 (a), (b) に示すように、ロボットアームに取り付けた本発明の各センサ(I~IV)を用い、ToFセンサ及び静電容量センサの検出範囲を測定し検証した。グラフ (c) には、ToFセンサivの検出範囲 (A)、ToFセンサiiiの検出範囲 (B)、静電容量センサのXZ軸方向の検出範囲 (C) をそれぞれ示す。
Expectations
本発明センサの開発・製造にご興味のある企業様、産業用ロボットアームやロボットハンド、あるいはクレーン等の重機を取り扱われている企業様を探索しています。福岡大学との秘密保持契約の締結により、未公開データ等の開示のほか、今後の研究の方向性などに関して、本発明者とのご面談も可能です。
ご質問、ご希望等ございましたら何なりとお尋ねください。
Publications
- Tsuji S. and Kohama T., IEEE SENSORS J. (2020) 20, 5519–5526.
- Tsuji S. and Kohama T., IEEJ Trans. SM (2021) 141, 197–204.
- Tsuji S. and Kohama T., IEEE SENSORS J. (2022) 22, 858–866.
- Tsuji S. and Kohama T., IEEJ Trans (2023) 18, 797–805. 【*上図等の出典文献】
Patents
日本特許第7153322号
Researchers
辻 聡史 准教授 (福岡大学 工学部 電気工学科)
以下のフォームからお問い合わせください