
Advantages
- 水平移動機構と鉛直伸縮機構を組み合わせた、省スペースな吊り下げ型空間移動マニピュレータ
- 空間の有効活用:天井から吊り下げる構造により、床面が開放され、人間が自由に作業できる広大な空間を確保でき、また天井が高いところでも設置できる。
- 既存インフラとの高い親和性: 工場に存在するクレーンやホイストの天井移動機構をそのまま活用できるため、導入コストを抑え、スムーズなシステム構築が可能。
Background and Technology
ジェットエンジンやNC加工機などの大型で少量生産の機械製造現場では、現在は作業者がクレーン・ホイスト等を用いて作業を行っており、危険で手間のかかることが問題となっている。このため産業用ロボットの導入が検討されているが、これらの複雑な工程の全自動化は、コスト増大に繋がり現実的ではない。また、大型製品製造ではロボットの作業空間確保が不可欠な一方で、ロボット自身の占有スペースが人間の作業空間を制限するという問題がある。これまで研究されているワイヤ型空間移動マニピュレータやドローンを用いた空間移動マニピュレータはワイヤが通過する占有空間の大きさや移動時の振動、高い消費電力の問題がある。
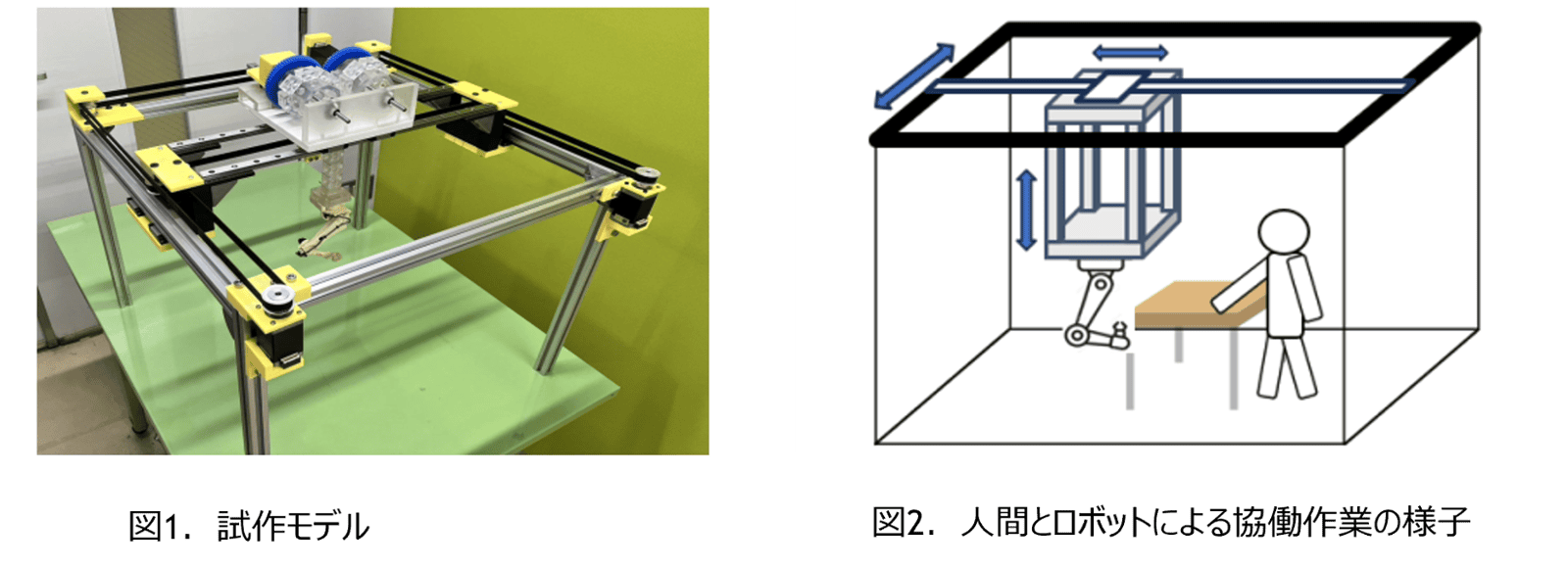
これらの課題を解決するため、筑波大学システム情報系の相山教授らはマニピュレータを天井から吊り下げる新しい手法を提案する。この手法では、天井に設置した機構による水平移動と、巻き取り式伸縮機構による鉛直方向の伸縮を組み合わせることで、機構自身の占有空間を最小限に抑え、広範な可動域を確保する(図1、2)。特に、大型製品を扱う場合でも従来のように大きな可動範囲を持つ大型マニピュレータは不要となり、必要最小限の大きさを持つロボットを空間移動させることで簡単に実現できる。さらに、電源を直接天井から供給できるため、配線の自由度も高く、効率的なシステム構築が可能である。これにより、床面が開放され、人間が安全かつ効率的に作業できる空間を確保できる。また、既存のクレーン設備も活用でき、導入コストを抑えつつ、大型製品の加工・組立、人との協働作業、クレーンとの協調搬送など、多様な用途での実用化が期待される。
Expectations
筑波大学では、本技術にご興味がある製造業やシステムインテグレーターの企業様や物流・倉庫企業様を探しています。筑波大学との秘密保持契約締結による未公開データ等の開示のほか、研究者との直接のご面談によるお打合せも可能ですので、お気軽にお問合せください。
Patents
特許出願中(未公開)
Researchers
相山 康道 教授 (筑波大学 システム情報系)
以下のフォームからお問い合わせください